Positioning card design: The positioning module takes STM32 as the main control core. The ST (Singapore) STM32WCBU6x chip is used in the positioning module, which uses a 32-bit ARM Cortex-M3 core. The STM32WCBU6x integrates a 2.4GHz IEEE8.2.15.4 compatible transceiver with 128KB of Flash and 8KB of RAM. , is a high-performance wireless system-on-a-chip (SoC). The main control schematic is shown in Figure 1. Small Gear Motor,Customized Dc Motor,Customized Dc Gear Motor,Dc Permanent Magnet Motor NingBo BeiLun HengFeng Electromotor Manufacture Co.,Ltd. , https://www.hengfengmotor.com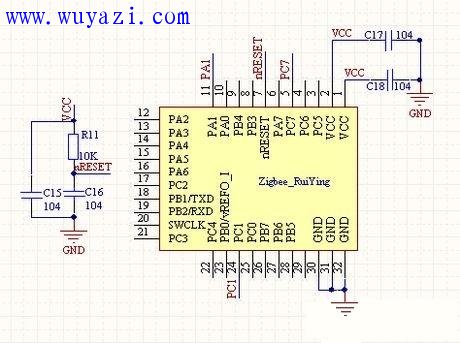
Figure 1 Schematic diagram of the main controller schematic circuit: This system requires an external MCU to control the data transmission and reception of the module, so the external MCU needs to communicate with the module, and its connection mode is (USART) serial port. The module provides a compliant USART interface with an IO level limit of 2.4 to 3.6V and a nominal 3.3V logic level. The module serial port is connected to the receiving (RX) terminal of the external MCU without using hardware flow control; the receiving (RX) terminal of the module is connected to the transmitting (TX) terminal of the external MCU.
Summary: The Zigbee module in the hardware part of the design of this positioning system uses STM32 as the main controller, which improves the working efficiency of the whole system and provides great help for the accuracy of personnel positioning. The Zigbee device in this solution can be powered by a common battery, and a battery can be used for at least 6 months, which reduces the cost to a certain extent. For the discussion of the relationship between communication distance and signal strength, the maximum likelihood estimation method is adopted to reduce the error.