When the ultrasonic wave emitted by the ultrasonic sensor encounters the object returning, the probe receives the reflected echo information, so that the received reflected echo can be analyzed, judged and calculated, the distance from the object to the probe is obtained, and the shape of the object is determined. The trigger pulse interval can be controlled by the program. The system uses 5 to 10 ms intervals and the maximum distance that can be measured is 850 to 1700 mm. Let the distance between the sensor and the object be L, the speed of sound in the air be c, and the propagation time from the transmission of the ultrasonic pulse to the reception of the reflected wave is Ts, then: The accuracy of the measurement of the propagation time Ts directly affects the accuracy of the ranging. We measure the time (zero crossing point) between the transmitted pulse and the first zero crossing of the received reflected wave as Ts. This time is slightly longer than the actual round-trip time of the ultrasound and should be corrected. However, this method makes good use of the characteristic that the rising edge of the received reflected wave hardly changes with the shape of the object, so the measurement time does not vary with the amplitude of the reflected wave signal, thereby enabling high-precision distance measurement. . Mining is the process of creating a block of transactions to be added to the Ethereum blockchain in Ethereum's now-deprecated proof-of-work architecture.
Mining is the lifeblood of any proof-of-work blockchain. Ethereum miners - computers running software - used their time and computation power to process transactions and produce blocks prior to the transition to proof-of-stake.
ETH Miner:Antminer E9 2.4Gh/S,Bitmain E9 2.4Gh/S,Bitmain Antminer E9 2.4Gh/S
Eth Miner ,Antminer E9 2.4Gh/S,Bitmain E9 2.4Gh/S,Bitmain Antminer E9 2.4Gh/S Shenzhen YLHM Technology Co., Ltd. , https://www.sggminer.com
The so-called "zero crossing point" is the first zero point after the threshold (threshold), and the point is used to determine the arrival of the reflected wave. As shown in the figure below, the zero crossing of the reflected wave does not change with the waveform. 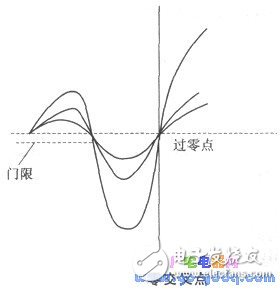
Another factor influencing the accuracy of the distance measurement is the temperature variation and the time delay of the system circuitry. The temperature change affects the speed of sound c and can be compensated in real time by a temperature sensor. which is:
c=co +0. 67t
Where: co is the standard sound speed (at 0 °C); t is the real-time measured temperature (°C). The system time delay can be corrected by the calculation method.
Through the above design measures and corrections, the system has higher ranging accuracy. It has been determined that the distance measurement of the system is in the range of 50-850 mm, and the measurement error is within 0.2 mm. The flow chart of the ranging program and peak acquisition program is shown in the figure below. 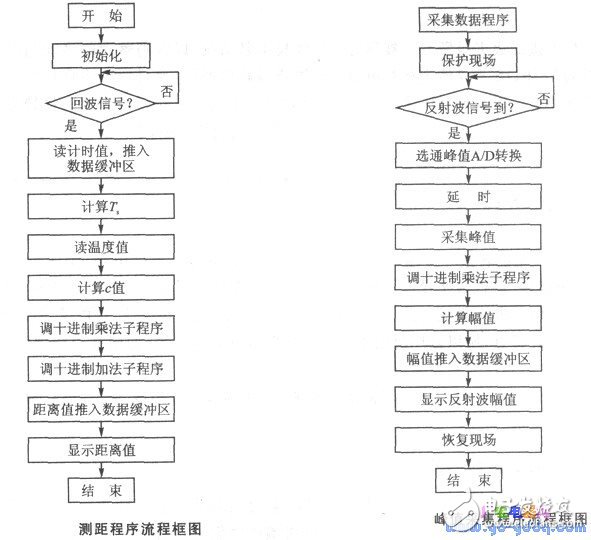
This ultrasonic vision recognition system has a high-precision ranging function. By applying the system, by scanning the object to collect distance information and reflected wave amplitude information, the shape and posture of the part can be taught and identified. The experimental results prove that parts with a certain degree of complexity in medium size, such as concave and convex, stepped, shafts with holes, grooves and bevels, discs and cabinets have the ability to recognize. This provides a new way to identify, detect, and classify part shape features in automated production. Because the ultrasonic visual recognition system has some special advantages, it has important theoretical value and practical value for further development, development and utilization of ultrasonic visual recognition systems.
The word mining originates in the context of the gold analogy for cryptocurrencies. Gold or precious metals are scarce, so are digital tokens, and the only way to increase the total volume in a proof-of-work system is through mining. In proof-of-work Ethereum, the only mode of issuance was via mining. Unlike gold or precious metals however, Ethereum mining was also the way to secure the network by creating, verifying, publishing and propagating blocks in the blockchain.
Mining ether = Securing the Network