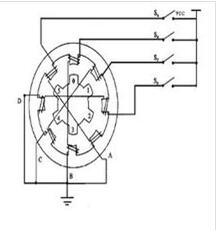
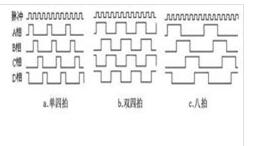
A stepper motor driver is an actuator that converts electrical pulses into angular displacement. When the stepper driver receives a pulse signal, it drives the stepper motor to rotate a fixed angle (called the "step angle") in a set direction, and its rotation is step by step at a fixed angle. The angular displacement can be controlled by controlling the number of pulses to achieve the purpose of accurate positioning. At the same time, the speed and acceleration of the motor rotation can be controlled by controlling the pulse frequency, thereby achieving the purpose of speed regulation and positioning. The stepper motor and the stepper motor driver constitute a stepper motor drive system. The performance of the stepper motor drive system depends not only on the performance of the stepper motor itself, but also on the advantages and disadvantages of the stepper motor driver. Research on stepper motor drives has been carried out almost simultaneously with the study of stepper motors. The principle of a stepper motor driver is powered by a unipolar DC power supply. As long as the phase windings of the stepper motor are energized at the appropriate timing, the stepper motor can be stepped. FIG. 1 is a schematic diagram of the working principle of the four-phase reaction type stepping motor. At the beginning of the four-phase stepping motor stepping diagram, the switch SB is powered on, SA, SC, and SD are disconnected, and the B-phase magnetic pole is aligned with the rotor No. 0 and No. 3 teeth. At the same time, the No. 1 and No. 4 teeth of the rotor are connected with C. The magnetic poles of the D-phase windings generate the wrong teeth, and the teeth of the 2nd and 5th teeth and the magnetic poles of the D and A phase windings generate the wrong teeth. When the switch SC is turned on and the SB, SA, and SD are turned off, the rotor rotates due to the action of the magnetic lines of the C-phase winding and the magnetic lines between the No. 1 and No. 4 teeth, and the magnetic poles of the No. 1, No. 4 and C-phase windings are aligned. . The 0th and 3rd teeth and the A and B phase windings produce the wrong teeth, and the 2nd and 5th teeth and the A and D phase winding magnetic poles produce the wrong teeth. By analogy, the four-phase windings of A, B, C, and D are alternately powered, and the rotor will rotate in the A, B, C, and D directions. The four-phase stepping motor can be divided into three working modes: single four-shot, double four-shot, and eight-shot according to the order of power-on. The step angle of the single four-shot and the double-four beat is equal, but the turning moment of the single four-shot is small. The step angle of the eight-shot working mode is half of the single-four-shot and double-four-shot. Therefore, the eight-shot working mode can maintain a high rotational torque and improve the control accuracy. The power-on timing and waveform of the single four-shot, double four-shot and eight-shot modes are shown in Figure 2.a, b, and c, respectively. The drive is equivalent to a combined unit of switches. The pulse signal of the upper computer sequentially energizes the motor phase sequence to rotate the motor. The number of steps/circle == is actually the number of steps used by the stepper motor to take a turn. You look at the number of steps/circles of other drivers. In fact, the relative is a few subdivisions. such as. 200 steps/lap is 200 steps in a circle. One step is 1.8 degrees. If it is a two-phase stepper motor. This 200 steps/circle is no subdivision. It’s a whole step. Because the 1.8 degree angle is the basic step angle of a two-phase stepper motor. If you adjust to .2000 steps/circle, you need to take 2000 steps. One step is 0.18 degrees. Because the basic step angle of the two-phase stepper motor is 1.8 degrees. And now one step is 0.18 degrees. That is, 1.8/0.18=10, this 10 is 10 subdivisions. When you tune to 2000 steps / lap is quite a tune with 10 subdivisions. The stepper motor driver has three basic stepper motor drive modes: full step, half step, and subdivision. The main difference is the control accuracy of the motor coil current (ie, the excitation mode). 1, the whole step drive In the whole step operation, the same stepping motor can be equipped with a full/half step drive or a subdivision drive, but the operation effect is different. The stepper motor driver cyclically energizes the two coils of the two-phase stepper motor according to the pulse/direction command (ie, the coil is charged to set the current). Each pulse of this driving mode will move the motor by a basic step angle, ie 1.80. Degree (200 steps in a circle of a standard two-phase motor). 2, half step drive In single-phase excitation, the motor shaft stops at the full step position. After the driver receives the next pulse, if the other phase is excited and remains in the excitation state, the motor shaft will move half a step angle and stop. In the middle of two adjacent full-step positions. The single-phase and then two-phase excitation stepper motor of the two-phase coil is thus cyclically rotated in a half-step manner of 0.90 degrees per pulse. All the full/half-step drivers supplied by Yamashito Electric can perform full-step and half-step drive, which are selected by the dialing position of the driver's DIP switch. Compared with the whole step mode, the half-step mode has the advantages of double the precision and less vibration during low-speed operation, so the half-step mode is generally used when actually using the full/half-step driver. 3, subdivision driver The subdivision drive mode has two advantages of low speed vibration and high positioning accuracy. Subdivided stepper motor drives are widely used in stepper applications where low speed operation is sometimes required (ie motor shafts sometimes work below 60 rpm) or positioning accuracy requirements are less than 0.90 degrees. The basic principle is to perform precise current control on the two coils of the motor according to the steps of sine and cosine, so that the distance of one step angle is divided into several subdivision steps. For example, the driving method of sixteen subdivisions can make the stepping motor of 200 standard steps per revolution reach the running precision of 200*16=3200 steps per revolution (ie 0.1125°). In general: in the whole step running state, the angular displacement of the motor shaft is a step angle every time a pulse is input. In the half-step running state, the angular displacement of the motor shaft is half a step for each pulse input. angle. It is preferable that the stepping motor does not use the whole step state, and the vibration is large in the whole step state. F3922, F3722L, F3722, F3722A, F3722M, F368, F3522A, F3522H, F3522, F2611, F268C, F875, F556, F256B, F265, F255, F235B, F245, F223 1, F represents the stepper drive 2, indicating the number of phases, 2 for two phases, 3 for 3 phases 3, 5 means current 5 amps 4, 22 means voltage 220V Stylus Pen For Microsoft Surface Product catagories of Stylus Pen For Microsoft Surface, which just can be worked on below Surface model, Please confirm your surface model before buying.
Microsoft Surface 3; Microsoft Surface Pro 3; Microsoft Surface Pro 4; Microsoft Surface Pro 5; Microsoft Surface Pro 6; Microsoft Surface Book; Microsoft Surface Laptop; Microsoft Surface Studio.
Stylus Pen For Microsoft Surface,Tablet Touch Pen,Touch Screen Stylus Pen,Universal Stylus Pen Shenzhen Ruidian Technology CO., Ltd , https://www.szwisonen.com

I understand the meaning of stepping motor step by step
What is the stepper motor driver?