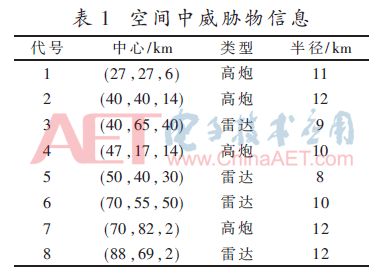
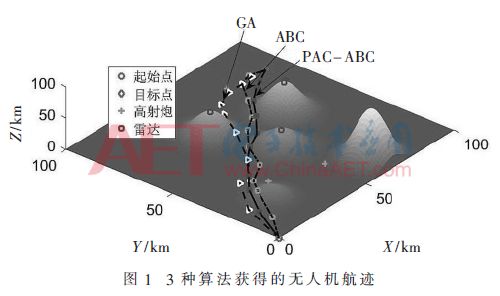
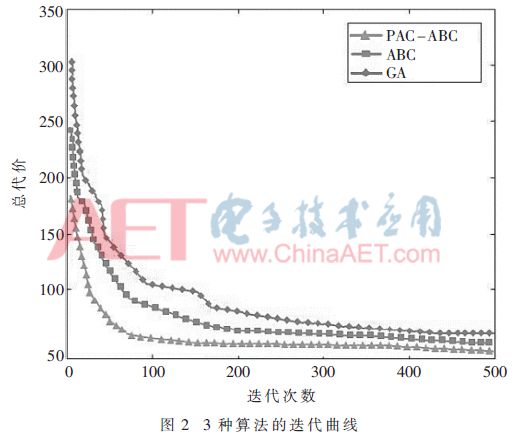
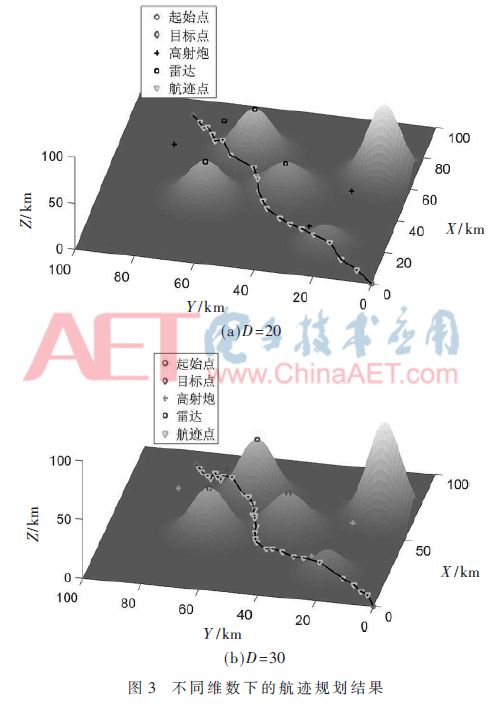
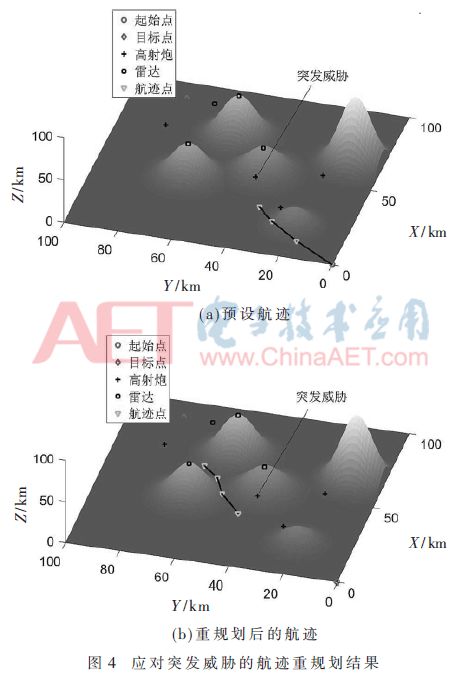
With the development of aviation technology, the application of drones in military and civilian fields has been expanding, such as: enemy reconnaissance, terrain exploration, geographic mapping, target bombing, high-voltage inspection lines. The tasks performed by drones are complex and diverse, and in order to improve their viability, autonomous flight must be achieved. As one of the key technologies for autonomous flight of UAVs, track planning has been a hot topic for scholars at home and abroad. Track planning can be seen as a multi-constrained combination problem that optimizes a set of unknown waypoints. According to existing reports, many artificial intelligence algorithms can effectively solve this problem. For example, XU C et al. [3] proposed the artificial bee colony algorithm (ABC) to solve the problem of UAV flight path planning, and added chaotic operators in the scouting search stage, which achieved good results. SZCZERBA RJ et al. [4] added an adaptive search strategy to the A* algorithm, which effectively removed the useless waypoints in the planning space and improved the search time of the algorithm. However, the above method only stays at the level of the two-dimensional track planning, and does not consider the terrain information in the planning space and the constraints of the corner, the subduction angle/climbing angle and the length of the shortest track segment of the drone. The three-dimensional track planning is more in line with actual needs and needs to be studied. In recent years, Zhang Renpeng et al. [5] used the improved particle swarm optimization algorithm to simulate the three-dimensional flight path planning of UAVs based on the establishment of topographic digital model, and obtained a safe and flightable track; ROBERGE V et al. [6] combined with genetic algorithm Advantages of both Genetic Algorithm (GA) and particle swarm optimization algorithm, using hybrid algorithm to solve the three-dimensional flight path planning problem of drone. However, as the above algorithm increases the dimensionality of the search space, the stability and convergence will decrease, and it will fall into the local optimum. In addition, these studies do not address how drones can cope with the effects of sudden threats. This paper uses the ABC algorithm to solve the three-dimensional flight path planning of the drone and the track re-planning problem for sudden threats. At the same time, in order to provide the convergence, robustness and stability of the traditional ABC algorithm, the adaptive search operator is introduced in the employment bee search, the new probability selection method is introduced in the follow-bee search, and the chaotic operator is introduced in the scout search. Thus, a Probability self-Adaptive Chaotic Artificial Bee Colony algorithm (PAC-ABC) was obtained. Then, the planning space, terrain information and track cost model of the drone are modeled, and the corresponding mathematical description is given. Finally, the effectiveness of the proposed algorithm is verified by three-dimensional track planning and sudden threat track planning simulation. 1 track planning modeling 1.1 Planning space and terrain model In three-dimensional space, the UAV path planning problem is to use the planning algorithm to find a series of flight waypoints that are suitable for flight and can meet the constraints. In the actual application of drones, various threat information such as terrain, radar, and anti-aircraft are hidden in the planning space. Sometimes these threats are still uncertain, so it is very important to obtain the threat information in the flight space in advance. Difficulty. In addition, the drone's battery life depends on the fuel consumption. In order to simplify the path planning process, the following hypothetical conditions are proposed: (1) the threats and terrain information in all planning spaces are consistent; (2) the fuel consumption of the drone is linear with the range; (3) The flight speed of the man-machine is kept constant; (4) factors such as gust disturbance, mechanical dynamics and mechanical vibration are ignored. The point (xα, yα, zα) is used to represent a certain waypoint in the planning space, where xα is the longitude value, yα is the latitude value, and zα is the altitude, so the planning space of the track planning can be described as [8]: Among them, (x, y) represents the mountain coordinate, (ak, bk) is the coordinate of the center axis of the mountain, and hk is the highest point of the mountain. 1.2 Track cost model The track cost model consists of a threat cost model and a fuel consumption cost model. Among them, the threat cost mainly considers the anti-aircraft threat and the radar threat [9]. (1) Radar threats. Generally, the detection range of the radar is circular, so the probability of the radar threatening the drone is: Where d is the distance from the radar center to the drone and dmax is the maximum radius of the radar detection area. (2) The threat of anti-aircraft guns. Similar to the radar threat, the scope of the anti-aircraft threat is also round, so the probability of the threat of the anti-aircraft to the drone is: (3) Fuel consumption cost. The fuel consumption is related to the voyage, so the fuel consumption is considered to be the total voyage. In addition, other constraints in the drone path planning process should also be considered: (1) The limit turning angle. The drone controls the change in heading by controlling its yaw angle. Because of the inertia, changing the heading during flight requires turning time and turning outer radius. The recorded track segment li is projected on the horizontal plane as mi=(xi-xi-1, yi-yi-1), and the limit turning angle allowed by the drone is θt, then the constraint can be described as: (2) Limiting subduction angle/climbing angle. The angle at which the drone is swooped and climbed in the height direction (z direction) is limited by its maneuverability. Therefore, the constraint equation for setting the maximum large subduction angle/climbing angle to θp is: (3) Minimum track segment length. During the flight, the change of the current flight attitude requires the drone to continue to fly for a distance. If the yaw angle of the drone changes frequently or the flight is greatly detoured, the navigation error will be expanded, so the track length should be reduced as much as possible. Set the minimum flight path length of the drone to lmin, then the mathematical description of the constraint is: In summary, the trajectory cost model is mainly composed of the above factors, so the three-dimensional trajectory cost model of the drone can be expressed as: In the formula, J1 ~ J5 respectively represent the threat index, fuel consumption index, limit turning index, limit subduction angle / climb angle index and minimum track length index during flight, and wk is the corresponding weight coefficient. 2 Improved artificial bee colony algorithm The ABC algorithm is an emerging meta-heuristic optimization algorithm for simulating bee colony cooperative foraging behavior proposed by Professor KARABOGA D of Turkey [10]. In the algorithm, the types of bees can be divided into three types: hiring bees, following bees, and scouting bees. The total number of bee colonies is N, and the number of employed bees and followers is half of the total population; each honey source is a D-dimensional vector, where D represents the number of solutions that need to be optimized. In the UAV flight path planning problem, each bee in the population corresponds to a set of feasible solutions, and the ABC algorithm searches for the optimal solution of the search space through the search methods of three bee species. At the same time, adaptive search strategy, new probability selection strategy and Logistic chaotic search operator are added to the algorithm. The specific steps are as follows: (1) Population initialization. Randomly send N bees to find the xij (i = 1, 2, ..., N; j = 1, 2, ..., D) honey source, you can solve. The honey source is produced by equation (9): (2) Calculation of honey source profitability. According to formula (10), the profit value of each honeybee initially searched for the honey source is calculated, and according to the size of the honey source, the first N/2 solution is taken. Among them, Si is the objective function value in the ABC algorithm. (3) Employment bee search stage. In this search phase, the honey source information will reduce the algorithm iteration rate due to the excessive mining of the hire bee [11], so this paper uses an adaptive search strategy to improve the original search mode, namely: (4) Follow the bee search phase. As the number of iterations of the algorithm increases, the individual population will evolve in one direction, but at the same time, other useful information will be missed, resulting in a decrease in population diversity. The performance improvement of the ABC algorithm depends to some extent on population diversity. The study found that the abandoned solution also contains useful information [12]. Therefore, in order to make the honey source with poor information can be fully explored, this paper adopts a novel probability selection method to ensure the diversity of the population: (6) Record the current optimal solution. When the algorithm encounters a termination condition, it outputs the optimal solution during the iteration. 3 simulation experiment In this section, the validity of the proposed PAC-ABC algorithm is verified by a three-dimensional flight path simulation example. In addition, the traditional ABC algorithm and the GA algorithm are also introduced for comparative analysis. The planning space uses a three-dimensional space of 100 km × 100 km × 100 km. There are 5 mountain peaks in the space, and the superimposed terrain information parameters are: In addition, the distribution information of radar and anti-aircraft in the threat is shown in Table 1. The starting point of the drone flight is (0,0,0), the target point is (90,80,0), and the planned dimension is D=10. The PAC-ABC algorithm, the ABC algorithm and the GA algorithm are used to simultaneously search for the optimal track. The initial conditions of the first two algorithms are set to: N=20, limit=15. The conditions for setting the GA algorithm are: antibody population number M=20, cross factor and mutation factor are 0.8 and 0.2 respectively. The three algorithms run 10 times each time, each iteration is 500 times, and then the optimal solution is recorded. The results of the track planning are shown in Figure 1. It can be seen from the figure that all three algorithms can generate the flight path, but the ABC algorithm and the GA algorithm obtain the track to cross the ridge, which will increase the probability of the drone being discovered; and the PAC-ABC algorithm obtains The trajectory flies along the valley and shortens the voyage compared to the other two algorithms, which helps to avoid threats and achieve low-altitude penetration. Figure 2 shows the iterative curves of the three algorithms. It can be seen from the figure that the proposed algorithm has the fastest convergence rate and can converge to the extreme value in about 100 generations, and the track cost is 51.231 2, while the ABC algorithm The track cost of the GA algorithm and the GA algorithm are 54.998 0 and 60.621 4 respectively. Under the effect of the improved strategy, the PAC-ABC algorithm can better avoid the local optimal value and quickly find the optimal solution. In order to further verify the robustness of the PAC-ABC algorithm, the effects of this algorithm on the UAV path planning problem are evaluated when D is 20 and 30 respectively. The simulation results are shown in Fig. 3. It can be seen from the figure that with the increase of the dimension, the PAC-ABC algorithm can still find a better track. This shows that the proposed algorithm has better robustness. Sometimes, undiscovered sudden threats are hidden in the planning space. When drones encounter these sudden threats, they need algorithms with re-planning capabilities to circumvent these threats. Let the drone suddenly detect the anti-aircraft at the (40, 40, 13) point from the starting point (0, 0, 0) to the target point (90, 80, 0), as shown in Figure 4(a). . If the flight continues without changing the track, the drone has a chance to be shot down, so it is necessary to re-plan its track. As shown in Fig. 4(b), the PAC-ABC algorithm re-planning the track can effectively avoid sudden threats, and the planning time is only 1.24 s. This shows that the proposed algorithm has a high iteration rate and a certain real-time performance. 4 Conclusion In the process of dealing with three-dimensional flight path planning of drones, this paper proposes an improved artificial bee colony algorithm. In the algorithm, the stability, search fastness and robustness of the algorithm are improved by adaptive search strategy, novel probability selection method and chaotic search operator. The 3D flight path planning experiments show that: (1) Compared with the ABC algorithm and the GA algorithm, the PAC-ABC algorithm can obtain the optimal track faster, and the track cost is 7.35% and 18.33% less than the former two; 2) With the increase of the solution dimension, the PAC-ABC algorithm can still obtain a better solution and has strong robustness; (3) The PAC-ABC algorithm can be used in a short time when dealing with sudden threats. The implementation of the local track is planned to ensure the safe flight of the drone. In summary, the proposed algorithm can plan a flightable and superior flight path for the drone. Glass Display,High Transparency Led Glass Digital Screen,Glass Window Led Advertising Display,High Level Outdoor Glass Led Display Kindwin Technology (H.K.) Limited , https://www.szktlled.com